(1)减压启动器的金属外壳应采取接地(接零)保护措施。
(2)减压启动器的启动电阻、启动电抗线圈、自耦变压器都是按短时工作设计的。使用中应注意每次启动时间不能过长,每小时内启动次数不能过多,而且相邻两次启动之间需间隔一段时间,以免过热而烧坏启动器。
(3)要定期检查启动器的触头,发现烧损要及时修理或更换。更换后的触头要保持动作同步。
(4)使用手动油浸式自耦减压启动器,应经常检查油槽内的变压器油,发现油色变黑应及时更换。换油时要同时清洗油槽,油槽内严禁进水。
(5)经常不用的减压启动器,重新使用时一定要检查、试验,各元件都正常后再用。 |
| 三相电动机接线盒 
三相异步电动机y接时,接线盒里,连接片的连接方式

三相异步电动机角接时,接线盒连接片的连接方式 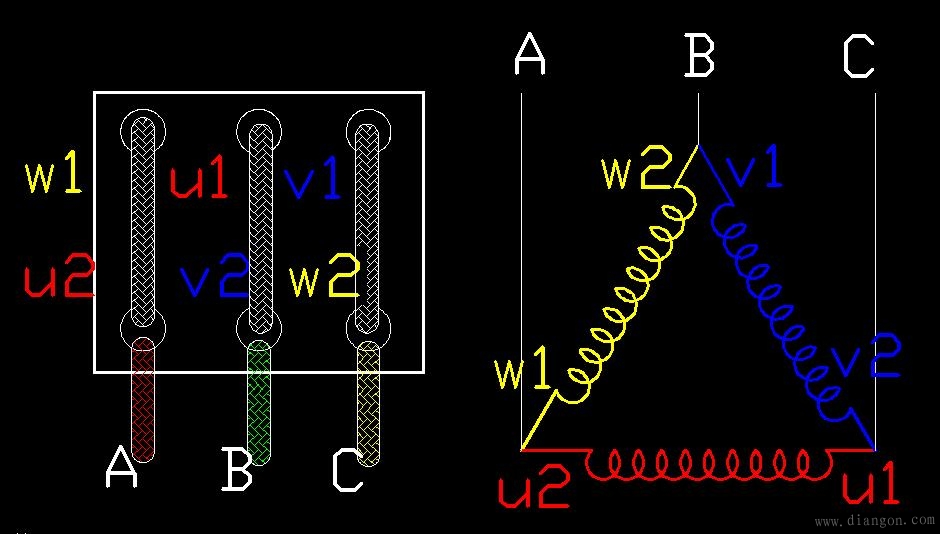
学习三相异步电动机的两种接法
今天在现场学了点三相异步电机的基本接法:星型接法和三角接法。虽然是些很简单的东,但勉。 
星型接法 
三角接法
图片都是从网上找的,借花献佛,嘿嘿。下面是我从网上找的,星型接法和三角接法的区别。
在承受相同电压及相同线径的绕组线圈中,星型接法比三角型接法每相匝数少根号3倍(1.732倍),功率也小根号3倍。成品电机的接法已固定为承受电压380v,一般不适宜更改。只有三相电压级别与正常380v不同时才改变接法,如三相电压220v级别时,原三相电压380v星型接法改为三角型接法就能适用;如三相电压660v级别时,原三相电压380v三角型接法改为星型接法就能适用,其功率不变。一般小功率电机是星型接法,大功率的是三角接法。额定电压下,应该使用三角形连接的电动机,如果改成星形连接,则属于降压运行,电动机功率减小,启动电流也减少。额定电压下,应该使用星形连接的电动机,如果改成三角形连接,则属于超压运行,是不允许的。大功率电机(三角型接法)起动时的电流很大,为了减少起动电流对线路的冲击,一般采用降压起动,原三角型接法运行改为星型接法起动就是其中一种方法,星型接法起动后转换回三角型接法运行。 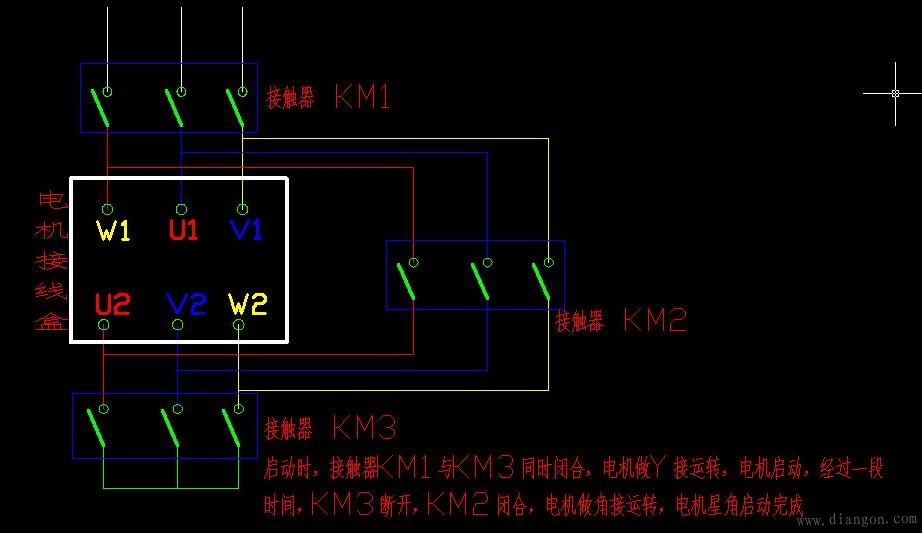
|
制动定义:转速方向n与电磁转矩t相反
制动形态:
1、位能性负载一般处于制动状态是使其保持一定的运行速度。
2、机械负载制动时一般是停车。
制动方法:
1、能耗制动
方法:切断电源,接入直流电,在定子回路中串入电阻。
原理:转子切割直流稳恒磁场产生电流,电流守稳恒磁场的作用产生制动转矩,即将转子的动能转变为电能,消耗在转子电阻上。
优点:制动力虽转速降低而减小,制动过程比较平稳。
缺点:需专门直流电源。
注意:制动结束后要切断直流电源,以免定子绕组发热。 
2.反接制动
1)电源反接制动
方法:改变电动机定子绕组与电源联接相序。
原理:电源反接,磁场反向,转子电流、T均反向。与n相反。

注意点:
a、为了限制制动电流和增大初始制动转矩,在转子回路串入制动电阻。
b、当转速接近为0时,需立即切断电源,让电机停车,否则反转。
利用制动特性曲线说明制动过程。
2)倒拉反接制动
方法:当绕线式异步电动机拖动位能性负载时,在其转子回路中串入很大的电阻。
场合:低速下放重物。
曲线:

过程:n =0,电磁转矩小于负载转矩,在位能负载的作用下,电动机反转,工作点从a点下移。此时因n<0,电机进入制动状态,直至电磁转矩等于负载转矩,电机才稳定运行于b点。因这一制动过程是由于重物倒拉引起的,所以称为倒拉反接制动(或称倒拉反接运行),其转差率
与电源反接制动一样,转差率s都大于1。
问题1: 一台yr系列绕线式异步电动机pn=20kw,nn=720r/min,e2n=197v,i2n=74.5a,λ=3。负载为额定值,即tl=tn。求:
(1)电动机欲以的速度下放重物,转子每相应串入多大的电阻?
(2)当转子串入电阻为r=39r2,电动机转速多大?运行在什么状态?
解:(1)通过例5-5知,r2=0.061Ω。
起重机下放重物,则n=-300r/min<0,t=tl>0,所以工作点位于第iv象限,如图c点。
当tl = tn时,sn = 0.04
转子应串电阻
(2)r=39r2,此时的转差率为
电动机转速
工作点在第iv象限,电动机运行于倒拉反接制动状态(下放重物)。
3.回馈制动
方法:电动机在外力(如起重机机高速下放重物)作用下,使其电动机的转速超过旋转磁场的同步速,即n>n1,s<0,转子中感应电势、电流和转矩的方向都发生了变化,电磁转矩方向与转子转向相反,成为制动转矩。此时电动机将机械能转变为电能馈送电网,所以称回馈制动,如图所示。这种制动状态在实际应用较少,。故不作深入研究。
过程:在位能性转矩的作用下,电动机的转速大于同步转速时,
注:转子回路不宜串电阻。否则电机下放重物的速度太快。
优点:简单,能量回馈电网。

5、异步电动机运行状态小结
1.机械特性
起动、调速、反向、制动在特性曲线上的描述如图所示
2.各种运行状态时的转差率s的数值范围
电动运行状态:0< s <1
反接制动状态:s > 1
回馈制动状态:s < 0

|
PLC,CPU,触摸屏,变频器,交换机,电机,电线,电缆,低压,



