 FB284怎样实现程序块运行控制?
FB284怎样实现程序块运行控制?
此程序块运行模式通过驱动功能"Traversing blocks"来实现,它允许自动创建程序块、运行至档块、设置及复位输出。
要求:
? 运行模式选择ModePos=6
? ConfigEpos=16#00000003
? 轴静止
? 轴必须已回零或值编码器已校正
步骤:
? 工作模式、目标位置及动态响应已在V90 PN驱动的运行块参数中进行设置,输入参数 OverV、OverAcc、OverDec速度、加减速度的倍率,通常采取默认设置即可(*)。
? 运行条件"CancelTransing" 及 "IntermediateStop"必须设置为 "1",Jog1 及 Jog2必须设置为 "0"
? 程序块号在输入参数 "Position" 中设置,取值应为 0~ 16
? 运动的方向由与工作模式及程序块中的设置决定,与Positive 及Negative参数无关,必须将它们设置为"0"。
? 驱动的运行命令AxisEnable=1
选择程序块号后通过Execute Mode的上升沿来触发运行。
FB284怎样实现点动"Jog"控制?
点动运行模式通过驱动的"Jog"功能来实现。
要求:
? 运行模式选择ModePos=7
? ConfigEpos=16#00000003
? 轴静止
? 轴不必回零或值编码器校正
步骤:
? 点动速度在V90 PN中设置,速度的OverV参数对于点动速度设定值进行倍率缩放,建议使用默认值*
? 运行条件"CancelTransing" 及 "IntermediateStop"与点动运行模式无关,默认设置为 "1"
? 驱动的运行命令 AxisEnable=1
? 给出jog1或jog2信号
注意:
? Jog1 及Jog2 用于控制EPOS的点动运行,运动方向由V90 PN驱动中设置的点动速度来决定,默认设置为Jog1 =负向点动速度,Jog2 = 正向点动速度 ,与Positive 及Negative参数无关,默认设置为"0"。
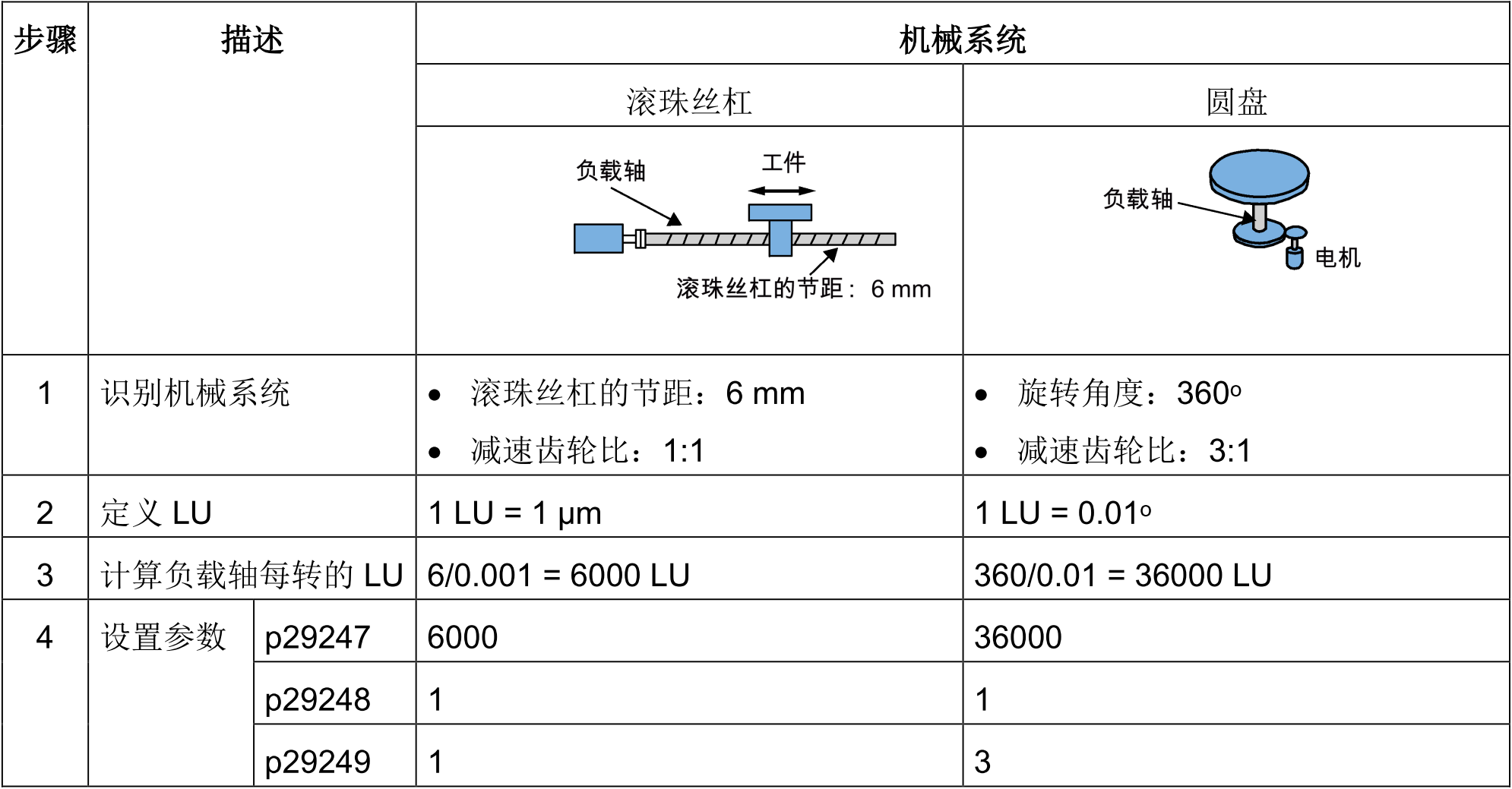
EPOS模式下机械参数如何设置?

EPOS模式在驱动中的位置单位为(LU),所有的位置设定,相关速度值和加速度值以及加加速度值在EPOS模式中都以LU为单位。
P29247为负载每转的LU值,其可以自己定义。目的是让负载每转的位移单位与EPOS中的LU建立关系,例如:负载每转10mm,P29247设置为10000LU,也就是10mm=10000LU,那么设定1LU,负载会位移0.001mm(=1um)
相关参数:

西门子模块6ES7522-1BL00-0AB0
射频辐射干扰射频辐射干扰来自变频器的输入电缆和输出电缆。变频器的输入输出电缆上有射频干扰电流时,由于电缆相当于天线,必然会产生电磁波辐射,产生辐射干扰。
触摸屏是人们对"带触摸功能人机界面"的通俗叫法!真正的触摸屏是"可以用手触摸操作的一块透明玻璃"而已!可以用来替代鼠标修改人机界面相关知识,什么是人机界面人机界面HMI基本概念和问题一人机界面HMI产品基本常识人机界面产品的定义连接可编程序控制器PLC变频器直流调速器仪表等工业控制设备,利用显示屏显示,通过输入单元如触摸屏键盘鼠标等写入工作参数或输入操作命令,实现人与机器信息交互的数字设备,由硬件和软件两部分组成
一、概述
油田注水监控项目就工程本身来说并不复杂,主要是监控油田注水系统各部分设备的运行情况和工艺参数,包括压力、温度、流量、电压、电流等,根据各参数的情况设定报警并保护设备安全。
项目特点:模拟量点多(本例子项目88个点),监控点比较分散
项目要求:
1、 系统稳定可靠
2、 强大的通讯扩展能力
3、 系统实时性高
4、 成本低廉
5、 实施简单、施工周期短
6、 通过组态软件显示监测参数,88个点达到上限或下限时都需要报警,其中27点达到下下限或上上限时,需要紧急停机
7、 2台上位机同时监控工作,各自独立,1台计算机故障不会影响对系统的监控
二、控制系统的选择
可以使用的控制系统有很多,也有许多成功的案例,一般来说主要有:PLC系统、数据采集系统、单片机系统
PLC系统:对一般小型PLC是无法实现本项目,因为模拟量点比较多且要求很强的通讯扩展功能,因此目前多采用中型PLC,如S7-300。缺点是成本比较高
数据采集系统:具有很强的扩展能力,非常适合分散远程安装,如亚当模块。缺点是实时性不足,控制能力弱
单片机系统:专为系统开发,缺点是灵活性不足,扩展能力弱
选用Haiwell(海为)PLC的理由
1、 Haiwell(海为)PLC通过CE认证系统稳定可靠,且节省投资成本
2、 编程简单方便,通过内置仿真器仿真运行调试程序大大缩短了现场调试时间
3、海为模拟量模块既可以本地并行扩展,也可以分散远程安装作为远程IO使用,不受AI/AO点数的扩展限制,完全可以实现对大点数系统的控制。
4、海为PLC支持5个通讯口,系统实时性高,通讯量的大小不影响程序的运行速度,程序的大小不影响通讯的速度,所有通讯由单指令完成,可以同时得电运行而不用考虑通讯端口冲突、发送接收控制、通讯中断处理等问题,而且具有对每个节点通讯故障的报警功能
三、系统网络图
PLC配置:(8*DI 32*DO 88*AI 3个通讯口)
1、 主机:HW-S16ZS220R 1台
2、 AI模块:HW-S08AI024N 11台
3、 DO模块:HW-S24DO024R 1台
4、 扩展通讯模块:HW-S01RS 1台
网络图如下:

四、部分程序说明
1、远程IO采集及远程站故障报警:使用Modbus读指令MODR将每个远程IO模块的8个通道值及故障代码读到PLC主机中,故障代码非0则报模块故障,与模块通讯失败连续1秒则报与该模块通讯失败

2、高报、高高报、低报、低低报:海为PLC提供了高限报警HAL和低限报警LAL指令,2条高报实现高高报,2条低报实现低低报,HAL和LAL指令与一般比较指令不同,它带死区功能避免了数值波动引起的报警频繁跳动

3、上位机软件:可以使用组态软件,亦可使用海为免费的通讯控件自己编写监控程序。组态一次可以分别安装在计算机1和计算机2中,实现同时监控
西门子代理商,西门子模块代理商,西门子一级代理商,西门子PLC代理,西门子中国代理商




