







SIMATIC S7-200 CN 6ES7235-0KD22-0XA8
- 供应商
- 浔之漫智控技术(上海)有限公司
- 认证
- 报价
- ¥88.00元每件
- 西门子
- 西门子代理商
- 西门子CPU
- 西门子plc
- 德国
- 全新原装
- 全国服务热线
- 19514718569
- 经理
- 吴悦
- 所在地
- 上海市松江区石湖荡镇塔汇路755弄29号1幢一层A区213室
- 更新时间
- 2024-01-07 08:08
6es7235-0kd22-0xa8

相似图像
*** 备件 *** simatic s7-200 cn,模拟输入/输出 em 235,仅用于 s7-22xcpu, 4 ae,+/-10v dc;1aa,+/-10v dc 12 位转换器 此 s7-200 cn 产品 只具有 ce认证
产品商品编号(市售编号)6es7235-0kd22-0xa8产品说明*** 备件 *** simatics7-200 cn,模拟输入/输出 em 235,仅用于 s7-22x cpu, 4 ae,+/-10v dc;1aa,+/-10vdc 12 位转换器 此 s7-200 cn 产品 只具有 ce 认证产品家族未提供产品生命周期 (plm)pm410:停止批量生产/ 仅供应有限备件plm 有效日期产品停产时间:2021.10.01价格数据价格组 / 总部价格组zr /2et列表价(不含税)显示价格您的单价(不含税)显示价格金属系数无交付信息出口管制规定eccn : n / al :n工厂生产时间10 天净重 (kg)0.171 kg包装尺寸8.60 x 10.10 x 7.10包装尺寸单位的测量cm数量单位1件包装数量1其他产品信息ean4025515073475upc未提供商品代码85389091lkz_fdb/catalogidst72-cn产品组4557组代码r131原产地中国compliance with the substancerestrictions according to rohs directiverohs 合规开始日期:2008.03.31产品类别a: 问题无关,即刻重复使用电气和电子设备使用后的收回义务类别是reach art. 33责任信息lead cas 号 7439-92-1 > 0, 1 % (w / w)lead monoxide (lead ...cas-no. 1317-36-8 > 0, 1 % (w / w)lblreachcode0236 > 0, 1 %(w /w)plc案例讲解|西门子s7-1200编写动态秤称重导读:今天为大家介绍一个用博图软件编写动态秤称重的案例,是已应用到实际工程中案例的一部分。下面对该案例的工艺要求进行描述:
物品称重根据秤的状态一般有两种方式:动态称重和静态称重。其中静态称重的秤是静止不动的,物品过秤后,即可得到重量数据。如果秤的精度高得出的数据也准确,但如用到自动产线,生产效率就太低了。而动态秤是随着自动流水线一起运动的,zui常用的是皮带秤。物品经辊筒输送机送至动态秤,动态秤称得重量后,将数据传给上位机或plc,随后进入输送分拣线,根据重量的不同,由plc给出指令,物品分拣输送至不同的格口,本例以物品重量数据传送给plc为例。因皮带秤是运动的,机械振动不可避免,因此得出的重量数据肯定会有误差,消出误差的一种方法就是在物品流经动态秤皮带的过程中,多次称量数据求和后取平均值。工艺流程简图如下图1所示:
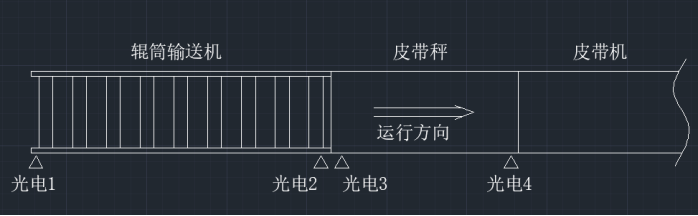
图1
当物品放置到辊筒机头部时会触发光电1启动辊筒机运行,运行到尾部光电2时,触发皮带秤启动。光电3上升沿时,开始称重。假设每200ms皮带秤传一次数据给plc,而物品经过皮带秤的时间为1.1秒,那么plc可以得到5次数据,相加后求平均值,算出的数据就会比较准确。当然皮带秤具体传送数据时间、物品流经皮带秤的时间要根据称重传感器的型号、性能和皮带秤的转速等实际情况而定,这里只是举例。
一、 硬件配置s7-1215cplc一台,称重传感器一套(带rj45通信口),不同重量砝码若干。
二、 软件准备
电脑安装博图v17软件。
三、 程序编写1. 打开控制面版,新建一个名称为“动态秤称重”的项目,点击项目视图,在项目树下添加一个1215cplc,分配ip地址。如下图2所示:
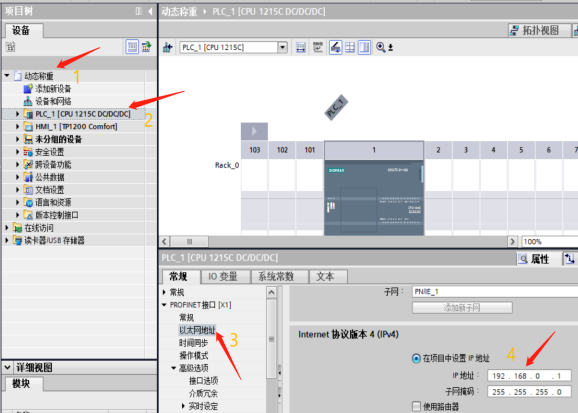
图2
2. 双击ob1,在右边指令集中选中“通信”选项下的modbustcp客户端指令mb_client,将其拖拽至程序编辑区,并填写各管脚参数。此指令用于plc和称重传感器建立modbustcp通信,plc为客户端,接收服务器(称重传感器)发送过来的物品重量数据。如下图3所示;
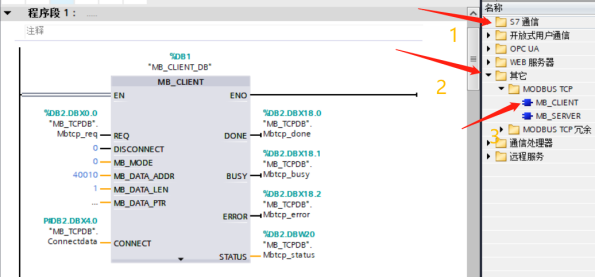
图3
3. 编写重量数据处理指令:双击项目树—plc_1—程序块—添加新块,在弹出的图框中选择fb程序块,语言选择scl。在打开的fb程序块编辑区建立输入输出变量,编写scl代码。如下图4所示:
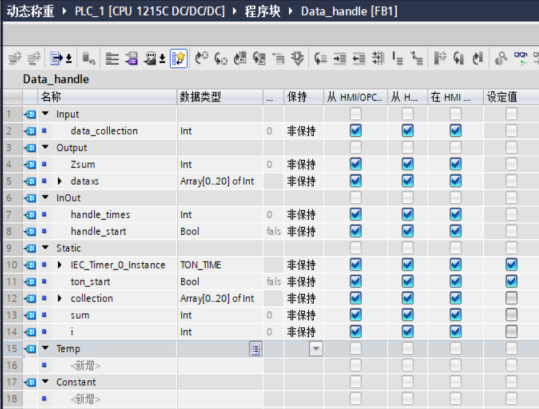
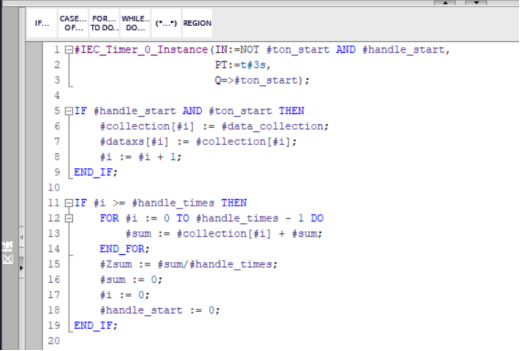
图4
4. scl代码解析:当图1中光电3被触发时开始计时,每210ms接收一次重量数据并传至相应的存储区,利用间接寻址可将5次采集的数据存放到数组当中。此处时长设为210ms比上文中所说的200ms多10ms是为了保证准确接收到数据。采集完后求和并除以采集次数,得到平均数据传到触摸屏上显示。
5. 仿真程序编写:考虑到很多学员没有实物,我们可以利用博图软件强大的仿真功能通过编写仿真程序来测试是否达到功能要求。在ob1中编写的仿真程序模拟称重传感器每200ms发送一次数据,如下图5所示:
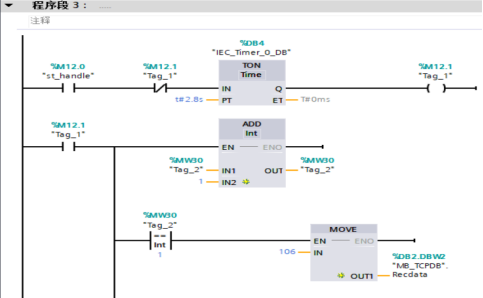
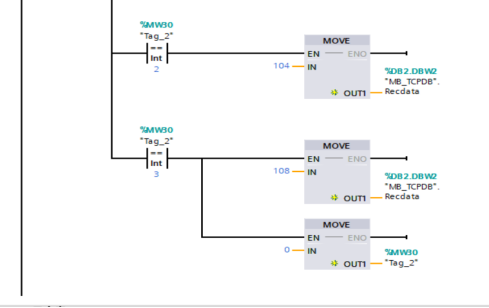
图5
四、 仿真效果因为采集周期200ms实在太短,不好观察数据的变化,因此将其改为2.8秒,数据的传送也相应改位3秒,采集次数也改为3次。仿真的效果如下图6所示:
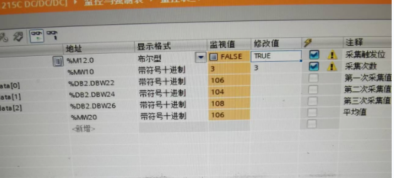
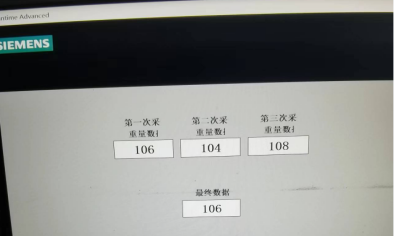
图6
图6第一张图为plc监控表中的数据,共采集了三次数据,分别是106、104、108,经fb1函数块scl代码处理后,得到平均值为106。第二张图为触摸屏数据显示,与plc的数据一致。
结语:本案例为实际工程案例中的一部分,并将之简单化、理想化,实际还要考虑现场诸多情况及故障报警处理,而且重量数据一般都是浮点数,所有关于重量的数据地址应设为浮点数类型。因此,以上的程序仅供参考、学习,希望对广大学员有所帮助。
d7-sys概述step 7 v5.6 sp2 或 step 7 v5.7 的可选软件包用于组态通过 simatic tdc 和 fm458-1 dp 完成的闭环控制和自动化任务
内容丰富的块库
通过 d7-fb-gen 函数块生成器,用 ansi c 生成用户库
许可d7-sys 随附提供了一个浮动许可证。借助于该浮动许可证,可将该软件安装在任意多台 pc上。这就意味着,每个许可证有一个用户可以独立于所用的 pc或不限于从某个特定工作站来使用该软件。获得许可证的数量决定可同时运行该软件的 pc 的数量。
v8.1 以前版本的用户可以升级到版本 9.1。
可以为 d7-sys 购买单独的软件更新服务。
在 v8.1 及更高版本中,以前曾单独销售的 d7-fb-gen 块生成器已包括在 d7-sys 供货范围内。
有关软件更新服务、许可证类型、在线软件交付以及如何使用自动化许可证管理器处理软件许可证的详细信息,请参见此链接。
![]()
使用 cfc 和 sfc 组态工具高效组态 simatic 控制系统。
![]()
通过 d7-sys 函数块库组态复杂工艺应用:
库的内容十分丰富,可用于逻辑、运算、运动控制和闭环控制
可通过 d7-fb-gen 和用户函数块进行扩展:
利用 ansi c 实现复杂功能
专有技术再利用
采用经过编译的块,保护专有技术
![]()
使用 simatic 标准工具进行组态
simatic manager 用于项目管理
hw config 用于硬件组态
cfc 和 sfc 用于软件组态
使用工具
pcs 7 import/export assistant (iea),用于高效大批量数据处理
version cross manager (vxm),用于项目比较
simatic logon,用于用户管理
siplus s7-400 功能模块概述功能模块可以使 cpu 从资源密集型任务中解脱出来,如计数、定位和闭环控制
模块种类
计数器模块
用于快速移动/爬行速度驱动的定位模块
用于伺服电机和/或步进电机的定位模块
电子凸轮控制器
闭环控制模块
功能模块
计数
fm 450-1计数器模块
定位
fm451定位模板用于快速移动/爬行速度驱动
fm 452 电子凸轮控制器
fm 453 定位模块
闭环控制
fm 455 闭环控制模块
fm 458-1 dp 应用模板
注:
为 simodrive 传感器或 motion connect 500提供了位置测量系统和预装配的连接电缆,以实现计数和定位功能。