





西门子6ES7355-1VH10-0AE0详细说明
- 供应商
- 浔之漫智控技术-西门子PLC代理商
- 认证
- 手机号
- 15221406036
- 经理
- 聂航
- 所在地
- 上海市松江区石湖荡镇塔汇路755弄29号1幢一层A区213室
- 更新时间
- 2024-05-08 07:10
西门子6es7355-1vh10-
概述
本程序适用于simatics7-212和s7-214的计数器,可以从0计到255,这要取决于输入10.0的状态。如果将输入10.0置为1,则程序减计数;如果将输入10.0置为0,则程序加计数。
如果输入10.0的状态改变,则将立即激活输入/输出中断程序,中断程序0或1分别将有储器位m0.0置成1或0。
例图

程序框图

程序和注解
本程序是一个输入/输出中断程序的范例,计数器从0计到255。如果输入10.0为0,则程序加计数;如果输入10.0为1,则程序减计数。
本程序包括以下三个程序:
main (主程序) 初始化和计数
int0 (中断程序0) 输入10.0为1时,减计数。
int1 (中断程序1) 输入10.0为0时,加计数。
本程序长度为32个字
//标题:事件中断
//********主程序*********
//主程序包括初始化程序和计数程序。
//计数器的存储器标志位m0.0的0或1状态,决定计数方向为加或减计数。
//当输入10.0山0变为1时,产生中断事件0,激活中断程序0(int0)。
//中断程序0将存储器位m0.0置成1,导致主程序减计数。
//当输入10.0山1变为0时,产生中断事件1,激活中断程序1 (int1)。
//中断程序1将存储器位m0.0置成0,导致主程序加计数。
//主程序
ld
movb
eni
atch
atch
ldn
ab>=
a
eu
incw
sm0.1
+0, ac0
+0, 0
+1,1
m0.0
16#fe, aco
sm0.5
ac0
//仅扫描时,sm0.1才为1,进行以下初始化
//将计数累加器aco清oa
//允许中断。
//输入10.0为上升沿时激活事件中断0
//输入10.0为上升沿时激活事件中断1
//如果存储器的标志位m0.0为0状态
//且计数累加器aco的当前计数值小于或等于254
//且0.5秒脉冲
//且上升沿
//那么计算累加器aco加1
ld
ab<=
a
eu
decw
m0.0
16#1,ac0
sm0.5
aco
//如果存储器的标志位m0.0为1状态
//且计数累加器aco的当前计数值大于或等于
//且0.5秒脉冲
//且上升沿
//那么计算器累加器aco减1
ld
movb
mend
sm0.0
ac0, qb0
//sm0.0总是1。
//在输出端00.0至00.7显示aco的当前计数值。
//主程序结束。
//******中断程序0******
//事件中断程序0将存储器的标志位m0.0置成
//此情况下程序减计数。
//
int 0 //中断事件0减计数。
s m0.0,1 //将存储器的标志位m0.0置成
reti //中断程序0结束。
//******中断程序1******
//事件中断程序1将存储器的标志位m0.0置成oa
//此情况下程序增计数。
int 1
r m0.0,1
reti
//中断事件1加计数。
//将存储器的标志位m0.0置成o。
//中断程序1结束。
请参考simatic s丁ep7编程参考手册的6.2节“中断指令",为您提供了更多的有关输入输出中断的信息
6sl3055-0aa00-3pa1控制单元
(1)指令功能
a(and):与操作,在梯形图中表示串联连接单个常开触点。
an(andnot):与非操作,在梯形图中表示串联连接单个常闭触点。
(2)指令格式如图1所示


图1 a/an 指令的使用
(3)a/an 指令使用说明:
² ² a、an是单个触点串联连接指令,可连续使用。如图2所示。

图2

² ² 若要串联多个接点组合回路时,必须使用ald指令。如图3所示。
² ² 若按正确次序编程(即输入:“左重右轻、上重下轻";输出:上轻下重),可以反复使用=指令。如图4所示。但若按图5所示的编程次序,就不能连续使用“="指令。
² ² a、an的操作数:i、q、m、sm、t、c、v、s。


随着建筑设计中楼宇智能化技术的发展,大型建筑群的供水系统也实现计算机的远程集中监控,以下介绍一个计算机监控的抽水系统,它采用vc++6.0可视化编程,通过计算机与plc的串行通信,由plc不断采集被控对象的状况参数,返回计算机,计算机按照控制程序方式,监控被控制对象的运行。
1.抽水系统的组成与功能
1.1.抽水系统的组成
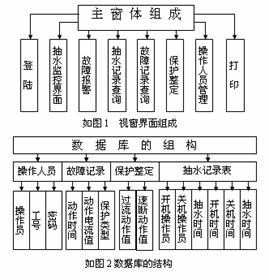
(1)抽水系统可视化界面结构如图1;
(2)相应的数据库结构如图2;
(3)系统共设计有八个人机对话窗体,具体功能如下表1:
序号窗体名称窗 体 功能1登陆为进入系统的登陆窗体,实现对操作员工号与密码的安全检查2抽水监控界面为系统运行主窗体,实现对抽水的监控功能,分别设置有抽水方式选种栏、状态显示栏、系统示意图等3抽水记录查询为抽水记录查询窗体,记录开机操作员、关机操作员、抽水方式、启动时间、停止时间、抽水时间数据4故障记录查询为故障记录查询窗体,记录故障发生时的故障电流值、故障类型、故障时间 5操作人员管理为操作人员管理窗体,对操作人员的工号和密码管理。6保护整定为保护整定窗体,可整定速断电流值,过流电流值和时限7故障报警为故障提示窗体8打印打印窗体
(4)硬件配置
系统的硬件配置如图3所示,plc用于开关量的输入与输出、电流数据输入,由plc的y0输出的开关量控制接触器km的状态,从而实现对抽水泵工作电源控制;而y0的状态由plc的r0继电器控制,通过计算机远程置位和复位r0继电器,实现远程控制;在现场按钮sb1和sb2也可以对r0继电器置位和复位,实现就地合闸和分闸;k1和k2红外线接近开关分别作为满水和缺水的信号输入;抽水泵的工作电流由电流互感器变换为0-5a,再经电流变送器进一步变换为合适a/d输入的电流。a/d转换后的数字量存放在专用的wx9中,供远程监控计算机的数据采集。
1.2.抽水监控系统的软件设计与功能
(1)抽水监控系统的软件程序流程图如图4所示。
(2)具有的电流速断和定时限过流保护功能,当计算机检测得到的电流数据大于速断电流整定值,则计算机瞬时发出分闸命令;如果大于过电流整定值,延时发出预告信号,报警后,在设定时间内不能恢复正常,计算机发出分闸命令。
(3)建立数据库,记录抽水系统开机、关机操作员的编号、分合闸的时间、抽水方式;故障时,记录保护动作时间、动作电流值和故障类型。
(4)抽水监控系统有具有手动,自动,定时三种抽水控制方式。选择手动时,计算机在系统启动时,直接发送合闸或分闸指令;选择自动方式时,系统启动后,计算机采集缺水信号,若接到缺水信号将发送合闸指令,开始抽水后,等待满水信号,若满水,则发送分闸指令;当选择定时方式时,系统等待设置的启动时间到,自动向抽水泵发送合闸指令;同样系统也可以等待设置的停止时间到,自动向抽水泵发送分闸指令。
(5)操作员进入系统和退出系统需要进行登陆检查,采用安全措施进入和退出系统。登陆系统后,操作员可以修改自己的密码,只有管理员有权注册新的操作员。
(6)系统运行的仿真示意图,实时显示抽水系统的工作状态,在计算机监控窗体增加了灯光和流程动画,直观地显示系统的运行状态,更好展现可视化的效果。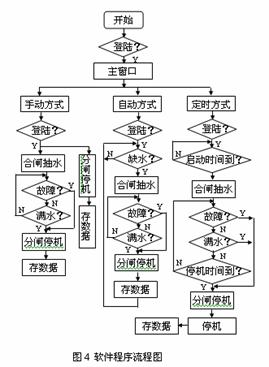
2.抽水监控系统设计的技术关键
2.1抽水监控系统的核心程序
抽水监控系统的核心程序为系列函数:发出通信指令函数,如其中读x2状态的函数read_x2();字符串转换并发送函数sendstring(cstringm_strsend);接收信息并转换字符串函数readstring ()等。
计算机发出查询x2状态通信帧时,调用sendstring(cstringm_strsend)函数,将通信帧转换数据类型,再用setoutput函数发送出去;plc接收到信息后,自动返回x2的状态,计算机监测到输入缓冲区字符数到指定个数,调用readstring()函数,接收并转换为cstring格式的字符串。
void ccsxtaview::read_x2()
{ m_com1.setoutbuffercount(0);
m_com1.setinbuffercount(0);
sendstring("%01#rcsr0000**\r\n");
sleep(100);
m_in=m_com1.getinbuffercount();
readstring();
x2=m_strread;
x2=x2.mid(6,1);
}
void ccsxtaview::sendstring(cstring m_strsend)
{ char txdata[100];
cstring m_strsend;
m_strsend=“%01#wcsr00021**\r\n”;
int count = m_strsend.getlength();
for(int i = 0; i < count; i++)
txdata[i] = m_strsend.getat(i);
cbytearray array;
array.removeall();
array.setsize(count);
for(i = 0; i < count; i++)
array.setat(i, txdata[i]);
m_mscomm1.setoutput(colevariant(array));//发送
}
void ccsxtaview::readstring ()
{
variant variant_inp;
colesafearray safearray_inp;
long len,k;
byte rxdata[2048]; //设置byte数组 an
//8-bit integerthat is not signed.
cstring strtemp, str;
str.empty();
strtemp.empty();
variant_inp = m_mscomm1.getinput();
//读缓冲区
safearray_inp = variant_inp;
//variant型变量转换为colesafearray型变量
len=safearray_inp.getonedimsize();
//得到有效数据长度
for(k=0;k<len;k++)
safearray_inp.getelement(&k,rxdata+k);
//转换为byte型数组
for(k=0;k<len;k++)
//将数组转换为cstring型变量
{ byte bt=*(char*)(rxdata+k);
strtemp.format("%c",bt);
//将字符送入临时变量strtemp存放
str = str + strtemp;
//转换完成后赋值给字符串str
}
}
2.2计算机与plc的通信帧
抽水监控系统的设计关键之一是计算机与plc的通信帧,plc的通信系统的基本协议规定通信帧有严格的格式,本系统采用松下的plc。上述read_x2()指令函数中的"%01#rcsr0000**\r\n"为计算机发出读plc的x2状态的通信帧,功能说明如下表2:
通信帧%01#rcsr0000**\r\n说明通信标志地址命令码,读接点接点编号效验码,不效验时用“*”代替结束码
2.3计算机与plc的串行口连接
计算机与plc的rs-232串行口有9和25个脚两种,而每个脚位的功能各有不同,正确连线才能使通信成功。计算机和plc的串行口一般为9脚,其定义和功能如下表3:
脚位pc机rs-232,其9支脚位的定义plc上的rs-232,其9支脚位的定义简写意 义简写意义1cd载波侦测fg保护接地2rxd接收字符sd传送字符3txd传送字符rd接收字符4dtr数据端备妥rs要求传送5cnd地线cs清除以传送6dsr数据备妥未用 7rts要求传送sg地线8cts清除以传送cd载波侦测9ri响铃侦测
计算机与plc串行口连接通常有两种,基于连接和基于不连接的信号接线方式如图5所示:
2.4运用vc++6.0语言编程实现对计算机的串行口的读写
vc++6.0语言对计算机硬件有较好的控制能力,运用mscomm控件对计算机的串行口的读写控制。首先要对mscomm控件(假设名称为mscomm1,其对应的控制变量为m_mscomm1)的几个属性进行设置。
m_mscomm1.setcommport(1);//设置通信端口
m_mscomm1.setsettings("9600,n,8,1");
//设置通信的波特率、效验方式、数据位、停止位
m_mscomm1.setsthreshold(1);//设置要接受的字符数,当输入缓冲区字符书达到设置值,触发oncomm事件
m_mscomm1.setportopen(true);//打开通信端口
设置各项属性后,运用mscomm控件对串行口进行读写,将读到的内容写入输出缓冲区,再将输入缓冲区的信息读到程序去,计算机依据程序自动完成工作。
应用m_mscomm1.getinput()和m_mscomm1.setoutput()属性就可以将计算机输入缓冲区的信息读到程序中和把程序中的信息输出到计算机的输出缓冲区。
vc++6.0语言的m_mscomm1.getinput()和m_mscomm1.setoutput()属性发出和接收的是colesafearray型数据,发送前要用sendstring(cstringm_strsend)实现转换,接收后要用readstring ()实现转换为cstring字符串。
plc发出命令帧后,读取plc的返回帧需一定的时间,否则返回帧的信息还未到达输入缓冲区,程序执行不正确的信息,所以在读返回帧的程序前,设置等待时间,使用sleep()让程序处于休眠状态等待完整的回帧的信息。
2.4.plc程序的配置
1)在plc程序要设置波特率、奇偶效验方式、数据位、停止位为“ 9600,n,8,1”,与计算机程序一致。
2)在plc程序要设置为允许计算机连接。
3)将程序下载到plc后,还要将plc断电再接通电,通信设置才生效。
3.结束语:
运用计算机的语言与计算机硬件控制、计算机与plc通信等技术,实现计算机远程监控系统的设计,本文介绍的控制系统可作为一个控制模块嵌入到大型的楼宇监控系统中;也可以根据企业生产过程的控制对象,修改相关的一些参数,作为工厂的在线监控系统。
0ae0详细说明