6ES7214-1HF40-0XB0现货供应
- 供应商
- 浔之漫智控技术-西门子PLC代理商
- 认证
- 报价
- ¥666.00元每件
- 手机号
- 15221406036
- 经理
- 聂航
- 所在地
- 上海市松江区石湖荡镇塔汇路755弄29号1幢一层A区213室
- 更新时间
- 2024-05-08 07:10
6es7214-1hf40-0xb0现货供应
电路分析 第 3 节 星形和三角形电阻网络的等效变换
一、 星形( y )和三角形(Δ)电阻网络
特 点
三端网络,端钮分别是①、②、③。

二、等效的条件
等效条件
端钮处对应的电压、电流分别相等

三、等效转换
对于Δ形电阻网络,有

对于 y 形电阻网络,有

根据等效的条件,得

用电导来表示,则

同样可得

当Δ形电阻网络的三个电阻都相等时,有
![]()
![]()
y 和Δ等效的一般公式

例 2.3-1 求图 2.3-1 ( a )所示二端网络的输入电阻 rab 。

解:先对三个 1 Ω电阻组成的Δ网络的节点作标记,在图 2.3-2 ( a )上分别记为①、②、③。再将这个Δ网络等效成 y形网络,如图 2.3-2 ( b ),由于Δ网络的三个电阻都为 1 Ω,即 ![]() ,则其等效的 y 形网络的电阻为
,则其等效的 y 形网络的电阻为
![]()
再根据电阻的串、并联关系,把图 2.3-2 ( b )等效成图 2.3-2 ( c ),并得到输入电阻
![]()
步进指令(stl)是利用内部软元件,在顺控程序上面进行工序步进式控制的指令。步进返回指令(ret)是指状态(s)流程结束,用于返回主程序(母线)的指令。
应用步进指令时注意
1.步进接点只有常开触点,而没有常闭触点,用  表示,指令用stl表示,连接步进触点的其它继电器触点用ld或ldi指令表示,使用stl指令后,应用ret指令使ld点返回左母线。
表示,指令用stl表示,连接步进触点的其它继电器触点用ld或ldi指令表示,使用stl指令后,应用ret指令使ld点返回左母线。
2.只有步进触点闭合时它后面的电路才能动作。如果步进触点断开 则其后面的电路将全部断开。但是在1个扫描周期以后,不再执行指令。
3.状态的地址号不能重复使用。
使用步进指令进行程序设计时,首先要设计状态转移图再根据状态转移图转化成步进梯形图或指令表。这三种表示法如图5—2所示。动作过程是当步进接点s20闭合时,输出继电器y1线圈接通。当x0闭合新状态置位(接通),步进接点s21也闭合。这时原步进接点s20自动复位(断开),这就相当于把s20的状态转到s21,这就是步进转换作用。其它状态继电器之间的状态转移过程,依此类推。

可见,状态转移图是一种用于描述顺序控制系统控制过程的图形,它由步、转换条件、有向线组成。每个状态(步)表示顺序工作的一个操作,需完成一个特定的动作。状态的转换(步进)需条件得到满足。与普通指令编程相比,使用步进指令不但可以直观地表示顺序操作的流程,而且可以减少指令程序的条数和容易被人们理解。每一状态提供三个功能:驱动负载、转换条件、置位新状态(同时转移源自动复位)。
根据步与步进展情况状态转移图有四种结构:
1.单序列。反映按顺序排列的步相继激活这样一种基本的进展情况,如图5-3所示。
2.选择序列。一个活动步之后紧接着有几个后续步可供选择的结构形式作为选样序列。如图5-4所示,选择序列的各个分支都有各自的转换条件。
3.并行序列。当转换的实现导致几个分支同时激活时,采用并行序列。其有向连线的水平部分用一双线表示。如图5-5所示。
4.跳步 重复和循环序列。在实际系统中经常采用跳步、重复和循环序列。这此序列实际都是选择序列的特殊形式。如图5-6a所示为跳步序列,当步3为活动步时,若转换条件x005成立,则跳过步4和步5直接进入步6;图5-6b所示为重复序列,当步6为活动步时,若转换条件x004不成立而x005成立,重新返回步5,重复执行步5和步6,直到转换条件x004成立,转入步7;图5-6c所示为循环序列,在序列结束后,用重复的方式,直接返回初始步0,形成序列的循环。


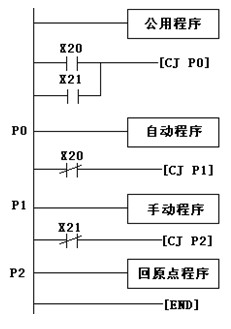
| 机械手的动作过程分析:从原点开始,按下启动按钮时,下降电磁阀通电,机械手下降,碰到下限位开关,下降电磁阀断电,下降停止;同时接通夹紧电磁阀,机械手夹紧。夹紧后,上升电磁阀通电,机械手上升,碰到上限位开关后,上升停止;同时接通右移电磁阀,右移至右限位开关,右移电磁阀断电,右移停止;同时下降电磁阀通电,下降至下限位开关,下降停止;通知夹紧电磁阀断电,机械手放松,放松后,上升电磁阀通电,机械手上升至上限位开关,停止上升;同时接通左移电磁阀,机械手左移至原点时,碰到左限位开关,左移电磁阀断电,左移停止。至此,机械手经过下降-夹紧-上升-右移-下降-松开-上升-左移八个动作完成一个周期。机械手的控制过程是一个典型的顺序控制,可以利用步进指令或功能指令实现控制要求。 简易机械手的操作方式分为手动操作、回原位操作和自动操作。自动操作方式分为单步、单周期、连续三种工作方式。机械手的控制程序分为手动操作和自动操作两部分。 程序总体方案如图所示。
|