西门子6ES7 214-1BG40-0XB0型号介绍
- 供应商
- 浔之漫智控技术-西门子PLC代理商
- 认证
- 报价
- ¥666.00元每件
- 手机号
- 15221406036
- 经理
- 聂航
- 所在地
- 上海市松江区石湖荡镇塔汇路755弄29号1幢一层A区213室
- 更新时间
- 2024-05-08 07:10
西门子6es7 214-1bg40-0xb0型号介绍
直流伺服也有电磁式和永磁式两种,但多为永磁式。它的良好控制性能主要是由于具有特殊的转子结构。根据其结构的不同,直流伺服电动机有以下的几种类型。
(1)普通电枢直流伺服电动机
这种伺服电动机具有与动力直流电动机基本相同的结构。即电磁式或永磁式定子,转子由带槽的铁心和嵌放于槽中的电枢绕组构成。但相对而言,电枢的长度与直径比较大,即它属细而长型转子。大中容量的直流伺服电动机一般都是这种结构,产品容量从几瓦到几百瓦甚至数千瓦。同时也由于这种转子结构,使它具有较强的负载能力,较大的堵转转矩,因此它特别实用于大负载的伺服系统。但由于转子结构复杂、体积较大,使得该电动机的机械惯性(时间常数)较大,低速时运行平稳性较差,控制死区较大。
(2)盘形电枢直流伺服电动机
这种电动机定子为永磁式。它的转子为一圆盘结构(即长度直径比小于1),电枢有线绕式(线绕盘式)和印刷电路式(印刷盘式)之分。该电动机结构简单、体积小、转子重量轻,因此,转子的机械惯性小(通常机种的机械时间常数小于30眦),但堵转转矩小。线绕盘式电动机容量可达数千瓦,印刷盘式的容量小一些。
(3)空心杯电枢直流伺服电动机
该电动机转子以一空心杯构体为骨架,其杯壁上放置(或印制)电枢绕组。其电枢绕组可以是绕线式绕组也可以是印刷式绕组。定子为永磁式。这种伺服电动机以机械惯性极小著称,控制灵敏度高,几乎无控制死区,其体积可做得非常小且重量轻。但堵转转矩较小,目前它的容量还不能做得很大,是一种微型伺服电动机。
(4)无槽电枢直流伺服电动机
无槽电枢直流伺服电动机与普通电枢直流伺服电动机的唯一区别是它的转子铁心不开槽,电枢绕组用固定胶粘贴在电枢表面。这种伺服电动机具有较大的负载能力,较大的堵转转矩,电动机容量可以做的较大,低速平稳性好。
(5)直流伺服齿轮减速电动机
这种伺服电动机是将微型直流电动机和一套高精度齿轮减速装置组装成一整体。直流伺服电动机的输出转速经过减速机构减速输出。因此,这种电动机的大特点是可以输出极低的速度(可低达零点几转每分)且低速时运行非常平稳。它特别适用于低速大力矩系统。
(6)直流力矩电动机
直流力矩电动机是一种低速大力矩伺服电动机。它能在不需要中间减速机构的情况下直接拖动负载实现低速大力矩的平稳运行,甚至可以工作在堵转情况下且无爬行现象,又具有很高的稳速精度。因此,特别适用于那些常用于较低速度且又有相当负载能力要求的场合。直流力矩电动机在结构上和普通电枢直流伺服电动机相同。它的定子主磁极数较多(通常6。8极),它通常做成扁平结构,电枢长度与直径之比一般仅为0.2左右(即外表呈现圆盘状)。它有内装式和分装式两种结构。内装式与一般电动机一样由生产厂装配成一整体。分装式将定子、转子和刷子三大部分分离出厂,使用时现场装配,转子直接套在负载轴上,机壳可根据需要自行选配。

图1 三相反应式步进的结构示意图
1——定子 2——转子 3——定子绕组{{分页}}
图1是常见的三相反应式步进电动机的剖面示意图。电机的定子上有六个均布的磁极,其夹角是60º。各磁极上套有线圈,按图1连成a、b、c三相绕组。转子上均布40个小齿。所以每个齿的齿距为θe=360º/40=9º,而定子每个磁极的极弧上也有5个小齿,且定子和转子的齿距和齿宽均相同。由于定子和转子的小齿数目分别是30和40,其比值是一分数,这就产生了所谓的齿错位的情况。若以a相磁极小齿和转子的小齿对齐,如图1,那么b相和c相磁极的齿就会分别和转子齿相错三分之一的齿距,即3º。因此,b、c极下的磁阻比a磁极下的磁阻大。若给b相通电,b相绕组产生定子磁场,其磁力线穿越b相磁极,并力图按磁阻小的路径闭合,这就使转子受到反应转矩(磁阻转矩)的作用而转动,直到b磁极上的齿与转子齿对齐,恰好转子转过3º;此时a、c磁极下的齿又分别与转子齿错开三分之一齿距。接着停止对b相绕组通电,而改为c相绕组通电,同理受反应转矩的作用,转子按顺时针方向再转过3º。依次类推,当三相绕组按a→b→c→a顺序循环通电时,转子会按顺时针方向,以每个通电脉冲转动3º的规律步进式转动起来。若改变通电顺序,按a→c→b→a顺序循环通电,则转子就按逆时针方向以每个通电脉冲转动3º的规律转动。因为每一瞬间只有一相绕组通电,并且按三种通电状态循环通电,故称为单三拍运行方式。单三拍运行时的步矩角θb为30º。三相步进电动机还有两种通电方式,它们分别是双三拍运行,即按ab→bc→ca→ab顺序循环通电的方式,以及单、双六拍运行,即按a→ab→b→bc→c→ca→a顺序循环通电的方式。六拍运行时的步矩角将减小一半。反应式步进电动机的步距角可按下式计算:
θb=360º/ner (1)
式中 er——转子齿数;
n——运行拍数,n=km,m为步进电动机的绕组相数,k=1或2。
但动态性能差、效率低、发热大,可靠性难保证。
由于直流伺服实际上就是一台小容量的他励直流电动机,因此,普通直流电动机的各种驱动模块实际上均可用来驱动直流伺服电动机。但是,一般而言,直流伺服电动机的容量远小于普通驱动用直流电动机,即电枢驱动容量较小,而普通直流电动机的驱动模块通常都是应用于中大容量的电动机作为驱动。另外,作为伺服电动机由于其控制的线性度、灵敏性和快速性等的特殊要求,对驱动模块的动静态特性也有相应的要求。因此,直流伺服电动机往往需要有自己专门的驱动模块。适用于直流伺服电动机的典型驱动电路实际上是一种直流线性功率放大器,它将直流控制信号直接进行电压和功率放大而驱动直流伺服电动机,如图1所示。因此,直流伺服电动机的驱动模块又叫做直流伺服放大模块。

(1)直流伺服电动机驱动模块的基本形式及原理
原理上,直流伺服电动机驱动模块也由功率电路和控制电路两部分构成。而功率电路原理上有两种基本形式,这两种基本形式分别叫电压控制型(dsmdrv)和电流控制型(dsmdrc)。
(2)用功率器件构成的驱动模块dsmdr
用功率电子器件可以构成一种带限流功能的电压控制型双向驱动模块,
(3)用功率构成dsmdr驱动模块
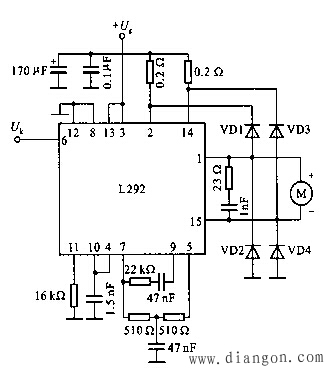
由于直流伺服电动机通常是低电压小功率。因此,可以采用一些通用功率集成电路构成直流伺服放大器直接驱动直流伺服电动机。此外,目前市场上已有专用于驱动直流伺服电动机的专用功率集成电路。这种集成电路具有很大的输出电流能力且用它们构成直流伺服放大器非常简单和容易。

与普通交流类似,交流伺服电动机也分为异步和同步两种。两相交流伺服电动机原理上就是一台两相。它的定子上正交放置两相绕组,这两相绕组一个叫励磁绕组,另一相为控制绕组。转子一般有两种结构形式,一种是笼型转子,这种转子的结构与普通笼型感应电动机的转子相同;另一种是非磁性空心杯转子,其结构如图所示。

笼型转子与空心杯转子比较。前者输出力矩大、结构简单、励磁电流小、效率高,唯一不足是转子转动惯量大,因而动态响应不如空心杯转子快。空心杯转子具有惯性小,反应灵敏,调速范围大、但这种电动机的励磁电流较大,因而功率因素和效率较低。
运行时,励磁绕组一般施加固定单相交流电压,通过对控制绕组的控制电压进行必要的控制来实现对转速的调节。同时应注意,在相位上是不同的。
从两相交流伺服原理分析,可知道交流伺服电动机定子上有两相正交绕组。一个是励磁绕组,作为电动机工作磁场的建立;另一个是控制绕组,作为电动机的运行控制,它们都是加交流电压。交流伺服电动机的控制方式有幅值控制、相位控制和双相控制三种。根据不同的控制方式,交流伺服电动机驱动模块有多种结构。
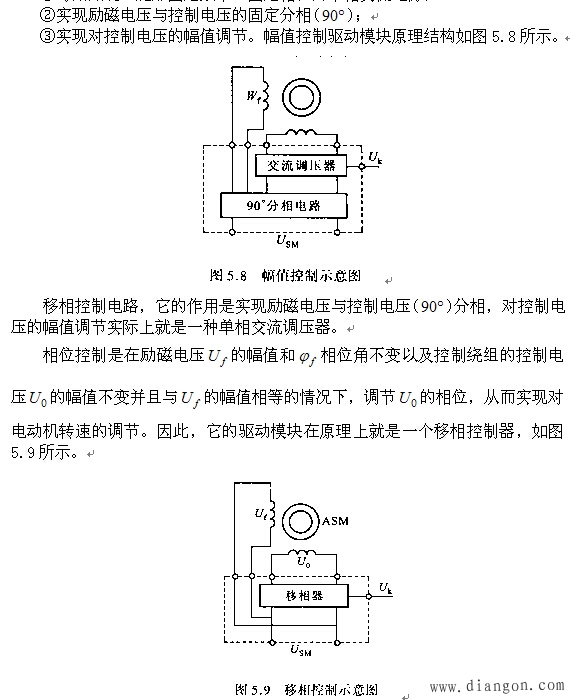
幅值控制是在励磁电压与控制电压相位差(90度)不变的情况下,仅改变控制电压的幅值来实现对电动机转速的控制。这时两相伺服电动机控制电路应具有这样三大功能:
①对励磁绕组施加固定频率、固定相位的单相交流;