




西门子电机6SL3120-1TE23-0AD0详细说明
- 供应商
- 浔之漫智控技术-西门子PLC代理商
- 认证
- 报价
- ¥666.00元每件
- 手机号
- 15221406036
- 经理
- 聂航
- 所在地
- 上海市松江区石湖荡镇塔汇路755弄29号1幢一层A区213室
- 更新时间
- 2024-05-08 07:10
西门子电机6sl3120-1te23-0ad0详细说明
西门子触摸屏结合西门子plc在闭环控制的变频节能系统中的应用是一种自动控制的趋势。触摸屏和plc在闭环控制的变频节能系统中的使用,可以让操作者在触摸屏中直接设定目标值(压力及温度等),通过plc与实际值(传感器的测量值)进行比较运算,直接向变频节能系统发出运算指令(模拟信号),调节变频器的输出频率。并可实时控到被控系统实际值的大小及变频器内的多个参数,实现报、记录等功能
西门子plc在高压固态软起动器中的应用摘要:先介绍了软起动的状况以及高压固态软起动工作原理。通过使用西门子s7-200可编程逻辑控制编程实现不同起动方式下的三相可控硅触发角给定模拟信号,利用市场上成熟的三相晶闸管移相触发模块接收plc给定的模拟信号后按照相对应的触发角输出六路脉冲列,然后通过光纤技术传送脉冲信号触发可控硅阀主件从而实现电机软启动效果,同时也很好的解决了高压隔离问题,本文还重点介绍到可控硅触发取能问题。关键词:软启动;plc;晶闸管移相触发;光纤触发随着工业的快速增长,三相交流异步电机因其结构简单、运行可靠、价格低廉、体积较小、机械性能好、运行维护方便等优点而被广泛采用。据统计,三相交流异步电机耗电量占全发电量的30%以上。然而,电动机的起动特性却一直不理想。*,电动机起动过程中的起动电流一般为额定电流3~7倍,可达电动机额定电流的8倍。这样大的电流不仅加重了进线、供电电网以及接在电动机前面的开关电器的负荷,而且同时出现的巨大转矩冲击又会使电动机发生猛烈的冲振,并且也给用作动力传输的辅助设备和做功的机械设备带来不可避免的机械冲击口。
三相高压交流异步电机的起动主要是通过在电源和电动机之间串联限流器件来实现降压起动,以确保起动过程中的性。起动方式主要有有级降压起动和无极软起动两类,前者对电压的调节是分档的,例如串电阻、串电抗、y-△等起动;后者对电压的调节是连续的,例如串反向晶闸管、串开关变压器等起动。此类软起动通常也称为固态软起动,在实际设计过程中晶闸管的触发角控制导通问题是决定此类软起动的成败关键所在。本文将利用西门子s7-200可编程逻辑控制器的灵活、实用、可靠性高、抗干扰能力强、编程简单、功能模块化、使用方便等特点配合专门的三相移相触发板解决软起过程中晶闸管的触发角控制导通问题,以及应用光纤触发技术解决高压隔离问题,从而有效实现软起动的斜坡升压软起动、斜坡恒流软起动、脉冲冲击起动等起动方式,另外plc还将实现系统模拟量采集、从站通讯、人机界面互动、逻辑控制等功能。2.高压固态软起动工作原理
plc控制器本身的硬件采用积木式结构,有板,数字i/o模板,模拟i/o模板,还有特殊的模板,条形码识别模板等模块,用户可以根据需要采用在板上扩展或者利用总线技术配备远程i/o从站的方法来得到想要的i/o数量
手动/自动切换
fb58的手动/自动切换是通过参数man_on来完成的,在man_on为true的时候,pid处在手动工作状态,此时,手动值通过参数man给出。

图8 控制输出
默认情况下,lmn_hlm和lmn_llm分别是100.0和0.0,从上图中可以看出,手动值的有效数值范围也应该是0.0~100.0。
在参数man_on为false的情况下,pid投入运行,控制回路处于自动工作状态。
为了降低手动/自动切换过程中扰动,算法通过如下措施来实现无扰切换:
- 在自动的状态下,比例和积分的运算结果之和会写入到单元man中,这样在由自动切换到手动的过程中不会引起控制输出波动;
-在手动的状态下,积分项的输出等于man的值减去比例项的值(偏差er*增益gain),而在自动状态中,积分项是一个累计的结果,这样在切换到自动状态时积分项不会有太大的突变。
从上面的分析可以知道,fb58已经集成了相应的无扰切换的功能,不需要编写额外的程序来实现。
2.5 保存和重新装载参数
保存和重新装载控制器参数是fb58中的新功能,主要用来实现在多套参数之间的切换。
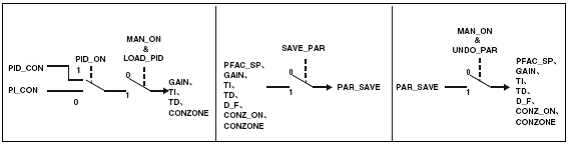
图9 控制参数保存和重新装载
从上图中可以看出,控制参数的处理有三种方式:
(1)从pid_con/pi_con中装载
要实现此装载,必须满足如下几种条件:
手动控制状态(man_on=true);
pid_con.gain或者pi_con.gain不为0;
load_pid为1
如果参数pid_on为1,则从pid_con中装载如下参数:
gain、ti、td,并计算conzone=250.0/gain
如果参数pid_on为0,则从pi_con中装载如下参数:
gain、ti、td,并计算conzone=250.0/gain。特殊地,此时会关闭控制带功能,即设置con_zone参数为0,并让微分参数td设置为0.0。
装载完成之后,参数load_pid会自动复位。
值得注意的是,如果pid_con中保存的增益参数pid_con.gain为0,则自动会修改pid_on为0,并转而从pi_con中获取参数。
注:pid_con/pi_con中的参数来自于自整定过程。
(2)保存参数
保存参数可以在任何工作状态下进行,只需设置参数save_par为1即可。可以将如下参数保存找par_save结构体中:
pfac_sp、gain、ti、td、d_f、conz_on、con_zone
在保存结束之后,参数位save_par会自动复位。
(3)重新装载参数
重新装载是“保存参数"的逆过程,但其执行是需要条件的:
手动控制状态(man_on=true);
par_save.gain不为0;
参数undo_par为1。
在重新装载完成之后,参数undo_par会自动复位。
3 **功能
3.1 控制带
温度控制回路是一个有明显滞后特性的对象,这给实际的调节过程带来了很多的问题,显著的困难就是在过程值偏离设定值较大时,调节过程过于缓慢,而在接近设定值时容易出现较大的超调。
从上述的两个问题出发,pid应该满足这样的功能:
- 在偏差超过一定的范围时,pid输出或者小的调节量,让温度值快速回到一个小的范围中,以缩短回路的调节时间;
- 在设定值附近时,越靠近调节量变化越小,以防止超调。
为此,fb58提供了一个“控制带(control zone)"功能,其工作原理是这样的:
- 当过程值pv大于设定值sp_int,且偏差的值超过con_zone,则以输出下限lmn_llm作为输出值;
- 当过程值pv小于设定值sp_int,且偏差的值超过con_zone,则以输出上限lmn_hlm作为输出值;
- 如果偏差的值小于con_zone,则以实际pid的计算结果作为输出值。

图10 控制带(正作用情况下,即gain>0.0)
默认参数中lmn_llm是0.0,lmn_hlm是100.0,控制带使能位conz_on是false,控制带范围是100.0。
如上图所示的控制带解决了在偏差较大时pid调节过于缓慢的问题,但在控制带范围中要避免因大滞后导致的超调,需要弱化pid的输出,要实现这个功能,可以通过降低比例参数和增加微分作用。在同样的偏差情况下,比例增益越小,pid输出变化越缓慢。微分作用简单来看就是通过偏差的变化量来调节,在接近设定值的过程中,温度变化速度在逐步变慢,此时的微分作用可以起到弱化控制输出的功能,进而达到减少超调的目的。因此,推荐控制带在有微分作用的前提下使用。参数装载的过程也体现了这一点:
- 如果是装载pi_con下的参数,因为没有微分功能,所以会设置conz_on为false。
在使用过程中,控制带参数con_zone应该始终设置为一个大于等于0.0的值,否则会导致pid运算结果永远不会被执行的故障现象